研究
ここでは、北海道十勝地方の大規模畑作酪農地帯を背景に,食の安全と環境保全型農業を目指し,各種農作業システムの分析評価,大型農業機械のメカトロニクス化に関する研究などを行っています。農業機械学をベースに,各種農業機械の理論と実際,ソフト開発を含めた総合的なコンピュータ教育,センサやロボットなどメカトロニクスに関する教育,ものづくりに関する教育を行っています。ロボットトラクタの開発


<概要>
北海道では農家戸数の減少に伴い,農業機械のオペレータ不足が深刻な問題となっている。現在,研究開発が行われているロボットトラクタ(以下,ロボトラ)は,この問題の解決策となることが期待されているが,実用化にあたり課題も残されている。ロボトラ利用のガイドラインでは現在完全無人走行が許可されておらず,協調作業もしくは同一圃場内の監視下でしか利用できない。また,ロボトラは本州の水田で行われる耕起作業を想定しているため,北海道の畑作作業に適応できるか否かの研究を行う必要がある。
PSDセンサを用いた散布高さ制御装置の開発

<概要>
北海道の防除作業では散布幅が30mを超える大型ブームスプレーヤが利用されており,散布能率が向上している反面,長大ブームによる散布高さの変動や不均一散布等が大きな問題となっている。筆者はこれまで超音波センサを利用したスプレーヤの散布高さ自動制御装置の開発を行ってきたが,超音波センサでは安定的な測距特性が得られない欠点がある。そこで本研究は,近年市販されているPSDセンサに着目し,予備研究の結果からスプレーヤの散布高さを計測するセンサとしての可能性を得たことから,複数のPSDセンサとワンチップマイコンで構成される散布高さ検出モジュールを開発することを目的とする。
Bluetoothの無線標識を用いたトラクタの乗車時間推定アプリ


<概要>
農業分野において、農業データを収集・分析することが生産性の向上につながると期待されている。特に高価なトラクタの利用状況を把握し効率的に管理することが求められる。我々はアワーメーターでは計測できない、トラクタの実作業時間を記録する収集するためのアプリケーションを開発した。トラクタへの乗車を認識するために、Bluetoothのid情報と電波の強度を発信するBeaconを利用した。スマートフォンでBeaconの電波を受信し、電波の強度に基づいてBeaconまでの距離を求め、一定の距離以内にいるときに乗車していると判断した。自動でトラクタへの乗車時間を記録するためにAndroidを対象としたアプリケーションを開発し、Beaconとスマートフォンを利用した乗車時間を記録が可能であるかを検証した。Beaconを利用して計測した距離が何m以内のときに乗車していると判断できるかと、実際にトラクタへ乗車したときに乗車時間が正しく記録されるかを明らかにすることを目的とした。
物理計算シミュレーションを用いたスプレーヤノズルの解析


<概要>
北海道のような大規模畑作地帯ではブームスプレーヤによる液剤農薬の散布が一般的である。その際,風による農薬の漂流飛散(ドリフト)は隣接する他の作物に影響を与え,残留農薬の原因になる可能性がある。これまでに本研究室では,農薬のドリフトを軽減させるため様々なノズルの散布特性について研究を行ってきた。これらの研究を行う際,本研究室所有の全長11mの小型風洞装置を使用していたが,実際に水道水を散布して,落下量分布を測定することから多大な労力と時間を要している。一方近年,コンピュータ技術の進歩により,数値計算による流体力学が発達し,コンピュータ上で高度なシミュレーションが可能になった。そこで,本研究はカニ目ノズルに焦点をあて,その散布特性について過去の風洞装置の実験結果と昨年度から研究に用いている流体解析ソフトParticleworksによるシミュレーション結果を比較することを目的とした。Particleworksは粒子法のMPS(Moving
Particle Simulation Method)をベースに設計・開発されている。この粒子法は流体を粒子に分割してモデル化し,流体全体の流れを解する方法であり,従来の解析方法と比較して流体の飛沫などの自由表面を伴う現象について容易に取り扱うことが可能となっている。コンピュータシミュレーションによる農薬散布試験が可能となることで,実験の省力化や実験条件の変更などが容易になることが考えられる。また,防除用の噴霧ノズルの開発現場では試験用の試作品を作ることなく実験を行うことが可能となることから,開発期間の短縮と開発費の削減につながると考えられる。
農作業用フィールドコンピュータの開発

<概要>
現在,十勝地方の販売農家1戸あたりの経営面積は約40haであり,少子高齢化や農業を取り巻く環境によって農家戸数が減少し,今後ますます経営面積が拡大することで大規模農業が発展されると予想される。十勝は畑作が中心で,本州の稲作と比べて多くの作業機を用いるため,作業機の性能や運用コストを記録することは,効率的な作業計画にとって重要である。また,精密農業に関する研究が多方面で行われているように,これまで以上に生産性を高めるためには,農家1戸ごとに農作業情報を蓄積・管理し,それを活用することが必要である。
そこで本研究は,十勝地方の大規模農業を対象として,情報通信技術を活用したトラクタの作業情報を記録し,インターネットを用いたクラウドコンピューティングシステムで作業情報を記録・管理・分析するシステムの構築を目的とする。特に,本研究ではトラクタ作業用フィールドコンピュータを開発し,農作業のクラウド化のための基本システムの構築を目的をとした。
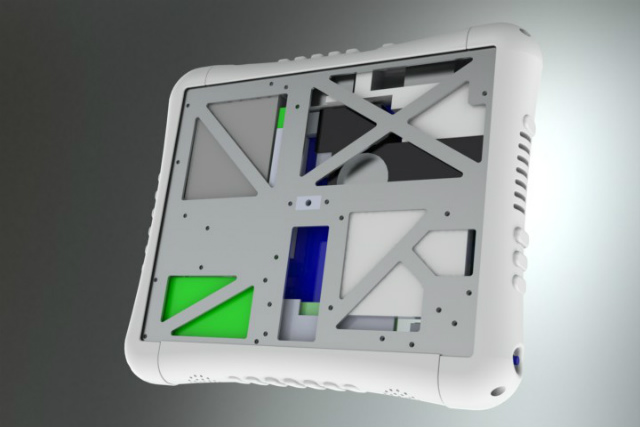
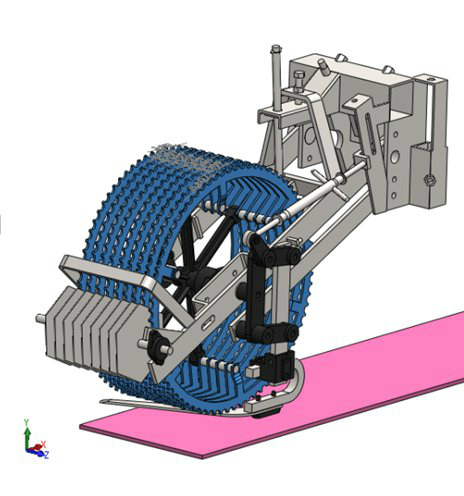
3次元CAD/CAEによるビートタッパの高精度高速化に関する研究
<概要>
テンサイは麦類,豆類,バレイショと共に北海道を代表する基幹作物の一つであり,近年1経営体当たりの作付面積が増加傾向にあるなかで,育苗から収穫作業に至る各種機械作業の高効率化が求められている。特に,その中でもテンサイを収穫する際,製糖時に不要となる茎葉を除去するタッピング作業を必要とし,その精度はその後の製糖効率や農家の収入に影響することから高精度な作業が求められる。ビートタッバは専用機とビートハーベスタ装着型に大別されるが,タッピング精度を維持するためにその作業速度は約1.5m/s以下に制限され,高能率作業の障害となっている。そのため,営農規模が拡大する中で,タッピング作業を高速高精度で行うことができる新たなビートタッパの開発が求められている。しかし,これまでの農業機械開発は,試作と改良を繰り返す手法が採られ,多大な時間と労力を必要としてきた。
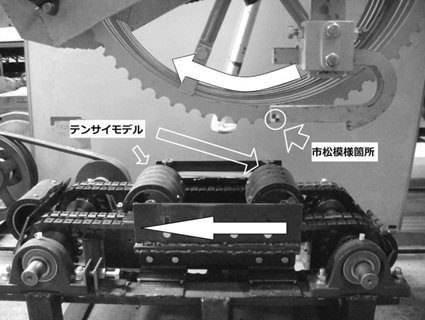
そこで,本研究は近年普及し始めているパソコン用の3次元CADソフトとそのアドインであるCAEの運動機構解析ソフトを利用し,コンピュータシミュレーションによって新たなビートタッパを開発するものである。本研究は3次元CADによるビートタッバの3Dモデルの構築とCAEによるタッピング機構の運動解析の手法およびその性能について,開発したテンサイ模擬走行シミュレータを利用して室内実験で検証することを目的とした。
太陽光発電における冬季の野菜栽培について


<概要>
十勝地方は冷涼で日照時間に恵まれた太陽光発電を行うのに適した地域であり,特に冬季はより効率的に発電が行える。本研究室では, エネルギの地産地消を目的に,
太陽光発電の農業利用に関する研究を行ってきた。本研究では, 冬季に発電した電力を利用する方法を模索するために帯広市川西町の農業技術センタに設置されている大型太陽光発電装置と地温上昇装置を用いて寒冷地でのホウレンソウ栽培の可能性について検討した。
ブームスプレーヤの散布精度についての研究

<概要>
畑作の防除作業は一般にブームスプレーヤによる液剤散布が主流である。ポジティブリスト制が施行されて以来,農薬の散布作業においても食の安全,安心を確保するための取り組みが行われている。特に,ノズルは消耗品であり,詰まりや磨耗による噴口の拡大,初期不良などの要因で均一散布が困難になる。一部のメーカでは出荷前に散布の状態を自主的に検査している。その場合,ブームに取り付けられた多数のノズルの散布パターンを計測するには多大な時間や労力,大規模な設備が必要となり,すべての出荷スプレーヤを検査することは極めて困難であると言える。そこで本研究は,ブームスプレーヤの散布パターンを計測するAAMS社(ベルギー)製のブームノズル用散布パターン自動計測装置の計測精度を今回評価用に製作したノズルテスタで明らかにすることを目的とした。
マニュアスプレッダの散布特性向上に関する研究

<概要>
慣行のマニュアスプレッダは,これまでの報告によると高水分の堆肥を散布する場合,均一な散布を行えず圃場内の分布も大きく変動することが明らかになっている。その原因は,機体中央部分に集中して散布が行われてしまうためであり,圃場に均一散布を行おうとした場合,作業間隔を狭くせざるをえず,効率的な作業の妨げとなっている。作業の効率化と高精度化が求められる現在の北海道農業において,高水分な堆肥の散布に対応する新たなマニュアスプレッダの改良が今後必要であると考える。マニュアスプレッダの散布特性を向上させるためには,散布機構のビータの取り付け位置や角度,形状,回転数など複数要素の変更が必要である。しかし,現行機の大掛かりな変更を行うことは構造上の制約やコスト面から難しく,また多くの実験や労力を伴うため,開発の障害となっている。
そこで本研究は,マニュアスプレッダのスケールモデルの製作を行い,種々の散布実験を行い,実機との散布状態の比較を行うことでスケールモデルを用いた効率的な開発手法の可能性を明らかにすることを目的とした。
キャベツの収穫適期判定システムの開発に関する研究
<概要>
現在,キャベツの生産は,長野県や愛知県が主産地となっていますが,夏秋に生産される露地キャベツは北海道が最も多く生産しています。
現在,キャベツの収穫は殆ど人手によって行われていますが,1個1〜2kgのキャベツを一日中収穫することは生産者にとって大変な苦痛を与えます。このため,最近はキャベツ収穫機が開発され,一部大規模生産者に利用され始めてきています。しかし,収穫時期のキャベツは生育差が大きく,一斉収穫機によって収穫すると未熟なキャベツも多く収穫してしまい,製品の歩留まりが低下して収益性も低くなる問題があります。そこで考えられるのがキャベツ収穫ロボットですが,機械的にこのキャベツは収穫OK,これはまだ早い,と言った収穫適期判定の技術は開発されていません。
一般に,生産者はキャベツの熟度を結球の大きさ,硬さ,半展開葉(球頭中央部にある葉)のめくれ具合や色つやなどで判定しています。そこで,本研究では2段階圧縮法でキャベツの硬さを求め,またレーザ距離センサで結球の非接触3次元計測を行い結球の大きさと半展開葉の状態からキャベツの収穫適期判定を行おうとするものです。

主な研究論文等
佐藤禎稔,宮本啓二,松田清明:圧縮法によるキャベツ収穫適期判定の基礎的研究,農業機械学会誌,Vol.63,1,p81-86,2001
佐藤禎稔,宮本啓二,松田清明:三次元視覚センサによるキャベツ結球の形状計測と収穫適期判定,農業機械学会誌,Vol.63,1,p87-92,2001
超音波センサによる大型スプレーヤのブーム高さ制御に関する研究
<概要>
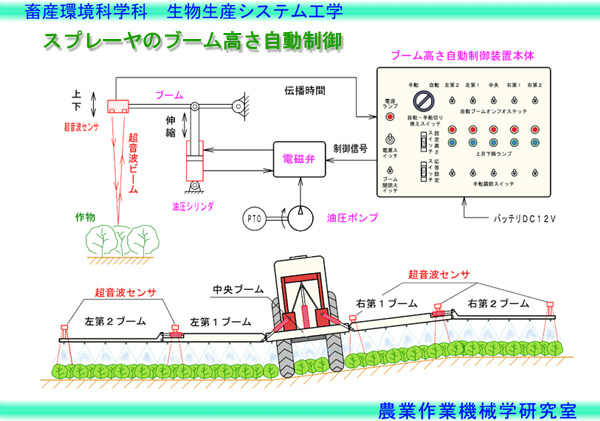
北海道の畑作地帯では大型ブームスプレーヤが使われており,トラクタの大型化に伴ってタンク容量や散布幅が拡大する傾向にあります。特に,散布幅はトラクタ直装式が18m,けん引式や自走式では30mにも及んでおります。散布幅の広いスプレーヤの場合,圃場の起伏や走行路面の凹凸により,ブーム先端の高さが大きく変動し,ブームが作物や地面に接触するなど作業性を大きく低下させる原因となっています。
本研究は,各ブームに超音波センサを取り付けて常時作業中のブーム高さを非接触で検出し,マイクロプロセッサを組み込んだブーム高さ自動制御装置によってブームを動かす油圧を制御して,最適なブーム高さに自動コントロールすることを目的としています。
この装置によって,農家の方々は今までのようにトラクタ後方のブーム状態を監視して手動調節することなく安全にかつ快適に作業することができるようになります。また,散布幅の広いブームスプレーヤでも常に均一高さでの防除作業が可能になり,農薬の風によるドリフト(漂流飛散)を抑えるなどの,クリーン防除が可能になります。
主な研究論文等
佐藤禎稔,宮本啓二,松田清明:超音波センサによるブームスプレーヤの噴霧高さ制御 (第1報)超音波による噴霧高さの検出特性,農業機械学会誌,Vol.54,2,p31-39,1992
佐藤禎稔,宮本啓二,松田清明:超音波センサによるブームスプレーヤの噴霧高さ制御(第2報)噴霧高さ自動制御装置の開発,農業機械学会誌,Vol.56,6,p59-67,1994
佐藤禎稔,宮本啓二,松田清明:十勝地方の大規模畑作地帯における防除作業の実態調査,農作業研究,Vol.37,3,p153-160,2002
佐藤禎稔,宮本啓二,松田清明:ブームスプレーヤの噴霧高さの実態,帯広畜産大学学術研究報告,Vol.17,p289-297,1991
Tadatoshi SATOW, Keiji MIYAMOTO, Kiyoaki MATSUDA: Influence of droplet size of spray on drift characteristics,Res. Bull. Obihiro Univ., Vol.18,p97-104,1993
高品質ナガイモの栽培管理に関する研究
<概要>
慣行の栽培法は,トレンチャと呼ばれる機械で,連続的な深溝播種床を造り,そこに種芋を播種して栽培しますが,ナガイモの性質上軟らかい土に向かって成長するため,曲がったナガイモも多くなる欠点があります。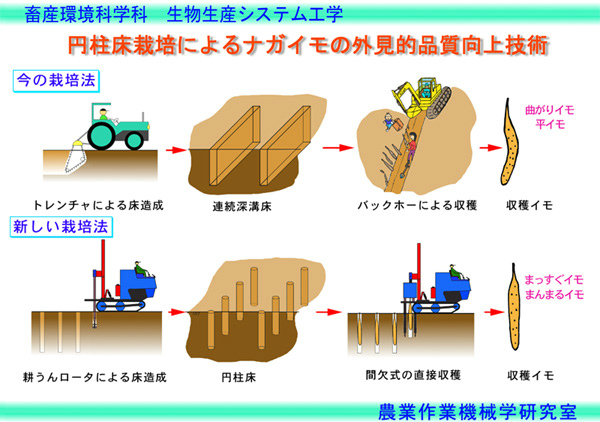
主な研究論文等
松田清明,宮本啓二,佐藤禎稔:ナガイモ堀取り機の収穫作業体系と作業性能および負担面積,農作業研究(日本農作業学会誌),Vol.36,3,p163-170,2001
暗渠土管自動敷設機の開発に関する研究
<概要>
農用地の生産性を向上させるために,古くから暗渠排水事業が行われています。しかし,素焼土管は環境に優しく,耐久性に優れ,排水効果が高い反面,取り扱いが難しく,その敷設に多大な労力を要しています。そこで,本研究は土管敷設の省力化とコスト低減を目的に,開発中の暗渠土管自動敷設機の作業精度および汎用性向上に関する総合的な開発研究を行っています。

主な研究論文等
佐藤禎稔,森田武,宮下行雄,大橋敏伸 他:管材の自動敷設機,特許出願番号:2002-11077
佐藤禎稔・松田清明・弘中和憲・辻 修・原 令幸:暗渠土管自動敷設機の開発(第1報)−慣行手作業の土管敷設作業とその作業能率−.農業機械学会北海道支部会報,45:55-62, 2005
佐藤禎稔・松田清明・原 令幸・大橋敏伸・宮下行雄・森田 武:暗渠土管自動敷設機の開発(第2報)−暗渠土管自動敷設機の概要と作業性能の評価−.農業機械学会北海道支部会報,45:63-70, 2005
レーザ式作物列センサによる作物列自動追従システムの開発
<概要>
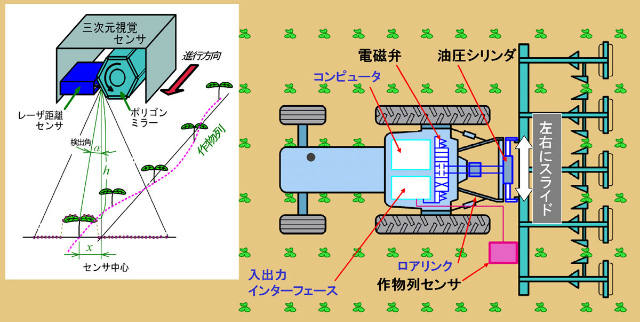
北海道の畑作は,耕うん整地から収穫まで一貫した機械化栽培体系が整備されています。そのなかで特に,播種・移植,中耕除草,収穫作業では生育している作物の畦に作業機を正確に合わせて作業しなければならず,高精度な畦合わせ作業が要求されています。その中でも中耕除草作業は,作業回数も多く,かつトラクタ後方の作業機を作物列に高精度に畦合わせすることが求められ,作業者は後方を頻繁に振り返り,作業機と作物の位置関係を確認したり,また前を見ている場合でも前輪と作物列との位置関係に細心の注意を払いながらトラクタの舵取り操作を行っています。
そこで,本研究は図のように,作業機側にレーザ式作物列センサを取り付け,常にセンサの真下を作物が通過するように,トラクタのロアリンクに取り付けた油圧シリンダの自動追従装置によって作業機を左右にスライドさせ,作物列に追従させる制御システムの開発を目的としています。
主な研究論文等
佐藤禎稔,松田清明,佐藤栄基,申宝明:三次元視覚センサによる作物列検出システムへの応用,農業機械学会北支報,Vol44,p29-34,,2004
Satow T., K. Matsuda, S. B. Ming, K. Hironaka and D. L. S. Tan : Development of Laser Crop Row Sensor for Automatic Guidance System of Implements.Automation Technology for Off-Road Equipment 2004, American Society of Agricultural Engineers (ASAE), Michigan USA, ISBN 1-892769-45-X, pp.131-139, 2004